พรีซิชั่เซอร์โวมอเตอร์กระแสตรง 46S/185-8A

คุณสมบัติพื้นฐานของเซอร์โวมอเตอร์ DC: (รุ่นอื่น ๆ ประสิทธิภาพสามารถปรับแต่งได้)
| 1.แรงดันไฟฟ้า: | กระแสตรง 7.4V | 5.ความเร็วสูงสุด: | ≥ 2,600 รอบต่อนาที |
| 2.ช่วงแรงดันไฟฟ้าปฏิบัติการ: | กระแสตรง 7.4V-13V | 6.การปิดกั้นปัจจุบัน: | ≤2.5A |
| 3.กำลังไฟ: | 25W | 7.โหลดปัจจุบัน: | ≥1A |
| 4.ทิศทางการหมุน: | เพลาเอาท์พุต CW อยู่ด้านบน | 8.การกวาดล้างเพลา: | ≤1.0มม |
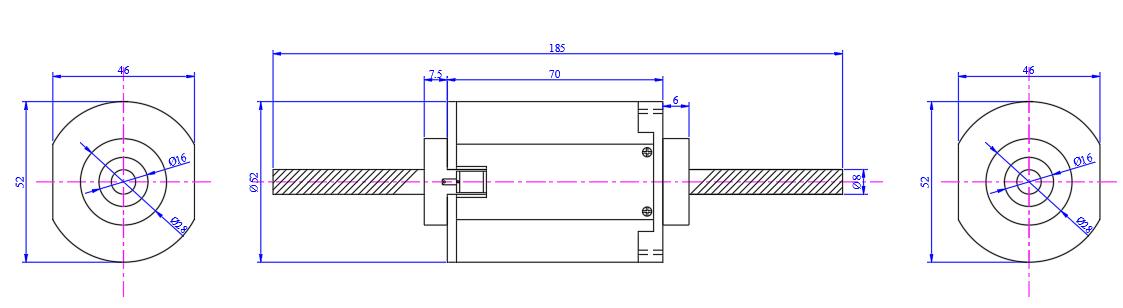
แผนภาพลักษณะผลิตภัณฑ์
เวลาหมดอายุ
นับตั้งแต่วันที่ผลิต ระยะเวลาการใช้งานที่ปลอดภัยของผลิตภัณฑ์คือ 10 ปี และเวลาทำงานต่อเนื่องคือ ≥ 2000 ชั่วโมง
คุณสมบัติของผลิตภัณฑ์
1. การออกแบบที่กะทัดรัดประหยัดพื้นที่
2.โครงสร้างลูกปืน;
3. อายุการใช้งานยาวนานของแปรง
4. การเข้าถึงแปรงจากภายนอกช่วยให้เปลี่ยนได้ง่ายเพื่อยืดอายุมอเตอร์
5. แรงบิดเริ่มต้นสูง
6. เบรกแบบไดนามิกเพื่อหยุดเร็วขึ้น
7. การหมุนแบบย้อนกลับ;
8.การเชื่อมต่อแบบสองสายแบบง่าย;
ฉนวนกันความร้อน 9.Class F, เครื่องสับเปลี่ยนการเชื่อมที่อุณหภูมิสูง
10.ประสิทธิภาพสูง ประสิทธิภาพต้นทุนสูง และการรบกวนต่ำ
การใช้งาน
มีการใช้กันอย่างแพร่หลายในด้านสมาร์ทโฮม อุปกรณ์การแพทย์ที่มีความแม่นยำ รถยนต์ขับเคลื่อน ผลิตภัณฑ์อิเล็กทรอนิกส์สำหรับผู้บริโภค อุปกรณ์นวดและการดูแลสุขภาพ เครื่องมือดูแลส่วนบุคคล การส่งผ่านหุ่นยนต์อัจฉริยะ ระบบอัตโนมัติทางอุตสาหกรรม อุปกรณ์เครื่องจักรกลอัตโนมัติ ผลิตภัณฑ์ดิจิทัล ฯลฯ
ภาพประกอบการแสดง



ระบบเซอร์โว: เป็นระบบควบคุมอัตโนมัติที่ช่วยให้ปริมาณที่ควบคุมเอาต์พุต เช่น ตำแหน่ง การวางแนว และสถานะของวัตถุ ติดตามการเปลี่ยนแปลงใดๆ ในเป้าหมายอินพุต (หรือค่าที่กำหนด) งานหลักของเซอร์โวคือการขยาย แปลง และควบคุมกำลังตามข้อกำหนดของคำสั่งควบคุม เพื่อให้สามารถควบคุมแรงบิด ความเร็ว และตำแหน่งเอาต์พุตจากอุปกรณ์ขับเคลื่อนได้อย่างยืดหยุ่นและสะดวก
เนื่องจากประสิทธิภาพแบบ "เซอร์โว" จึงได้ชื่อว่าเซอร์โวมอเตอร์ หน้าที่ของมันคือการแปลงสัญญาณควบคุมแรงดันไฟฟ้าอินพุตเป็นการกระจัดเชิงมุมเอาต์พุตและความเร็วเชิงมุมบนเพลาเพื่อขับเคลื่อนวัตถุควบคุม
หลักการของดีซีเซอร์โวมอเตอร์
หลักการทำงานของเซอร์โวมอเตอร์กระแสตรงนั้นเหมือนกับหลักการทำงานของมอเตอร์กระแสตรงทั่วไป แรงบิดแม่เหล็กไฟฟ้าถูกสร้างขึ้นโดยการกระทำของการไหลของอากาศกระดองและฟลักซ์แม่เหล็กของช่องว่างอากาศเพื่อทำให้เซอร์โวมอเตอร์หมุน โดยปกติแล้ว วิธีการควบคุมกระดองจะใช้เพื่อเปลี่ยนความเร็วโดยการเปลี่ยนแรงดันไฟฟ้าในขณะที่รักษาแรงดันไฟฟ้ากระตุ้นให้คงที่ ยิ่งแรงดันไฟฟ้าน้อยลง ความเร็วก็จะยิ่งต่ำลง และเมื่อแรงดันไฟฟ้าเป็นศูนย์ มันก็จะหยุดหมุน เพราะเมื่อแรงดันไฟฟ้าเป็นศูนย์ กระแสก็เป็นศูนย์ด้วย ดังนั้นมอเตอร์จะไม่สร้างแรงบิดแม่เหล็กไฟฟ้า และจะไม่ปรากฏปรากฏการณ์การหมุนตัวเองด้วย







